深度报告 | 大模型如何引领具身智能新发展?
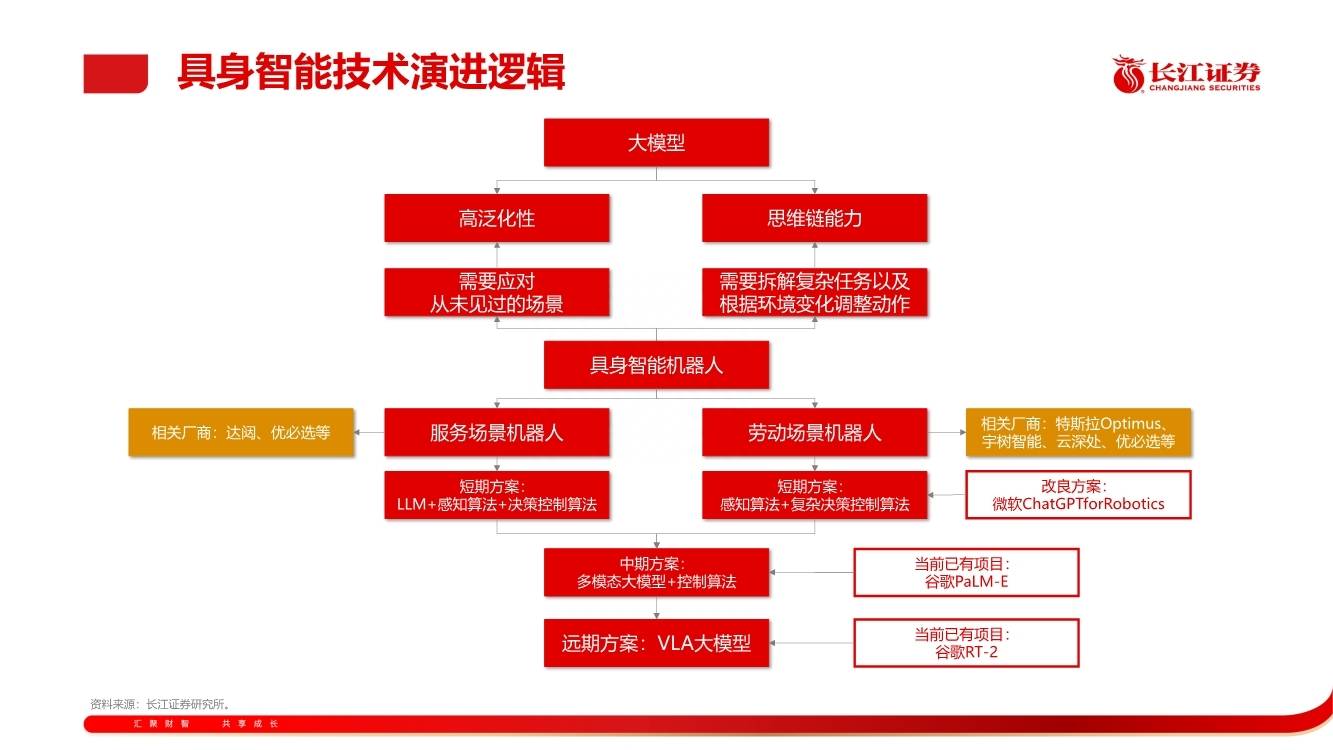
具身智能需要拆解复杂任务以及根据环境变化不断调整自己的动作和任务目标,因此需要思维链能力
在现实世界中,机器人难以一次性完成整个复杂动作,因此需要将复杂动作拆解成多个简单步骤完成;此外,由于现实世界远比机器人训练场景复杂,机器人不是唯一客体,所以在任务过程中会受到各种干扰,环境也会不断变化;因此具身智能机器人需要较强的思维链能力。
向PaLM-E机器人发出任务指令:“把零食从抽屉中拿给我”,机器人将其拆解为5个步骤。在执行过程中,人类把机械臂抓取的零食打落回抽屉。搭载PaLM-E的机械臂仍能调整任务目标,完成任务。
大模型是具身智能机器人的必备选项
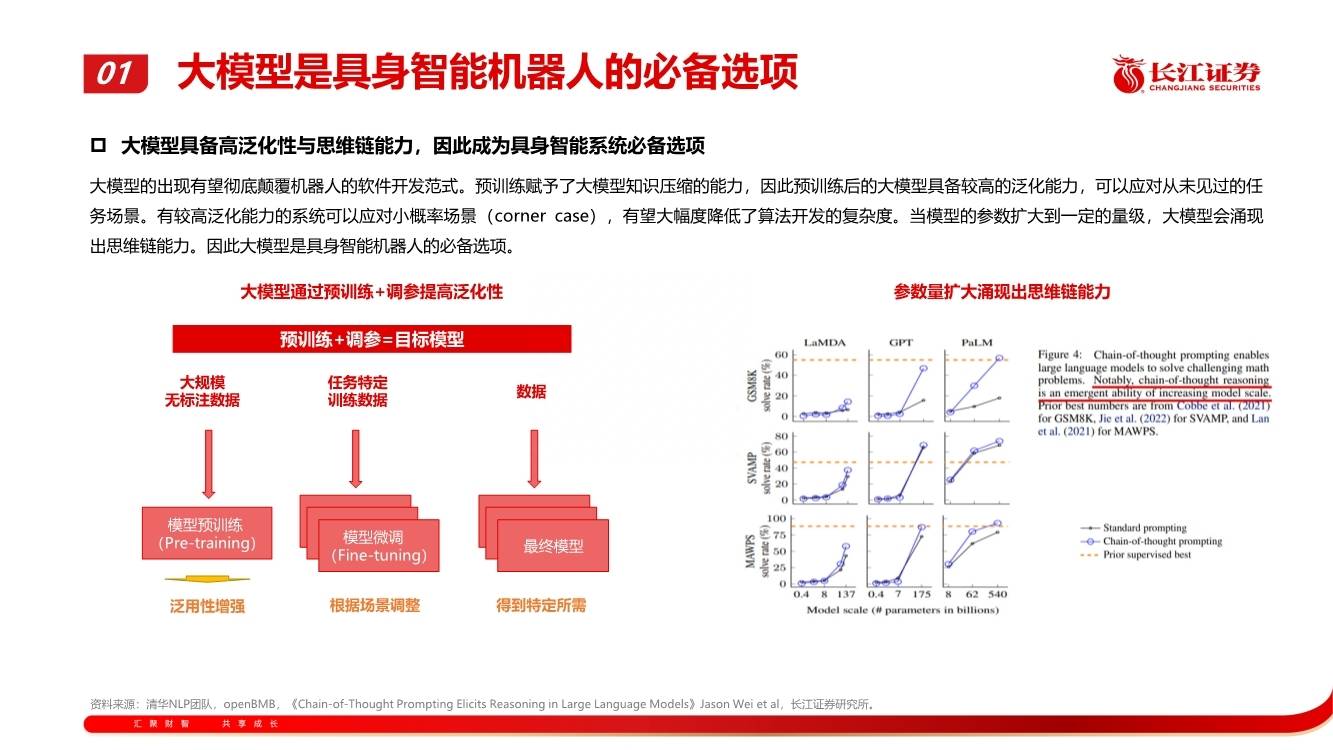
大模型具备高泛化性与思维链能力,因此成为具身智能系统必备选项
大模型的出现有望彻底颠覆机器人的软件开发范式。预训练赋予了大模型知识压缩的能力,因此预训练后的大模型具备较高的泛化能力,可以应对从未见过的任务场景。有较高泛化能力的系统可以应对小概率场景(cornercase),有望大幅度降低了算法开发的复杂度。当模型的参数扩大到一定的量级,大模型会涌现出思维链能力。因此大模型是具身智能机器人的必备选项。
内容看点:
什么是具身智能?
本轮大模型进步对具身智能影响
巨头的布局和行动
投资关注点
来源:长江证券
报告内容节选如下: